product manual
PRODUCT DESCRIPTION
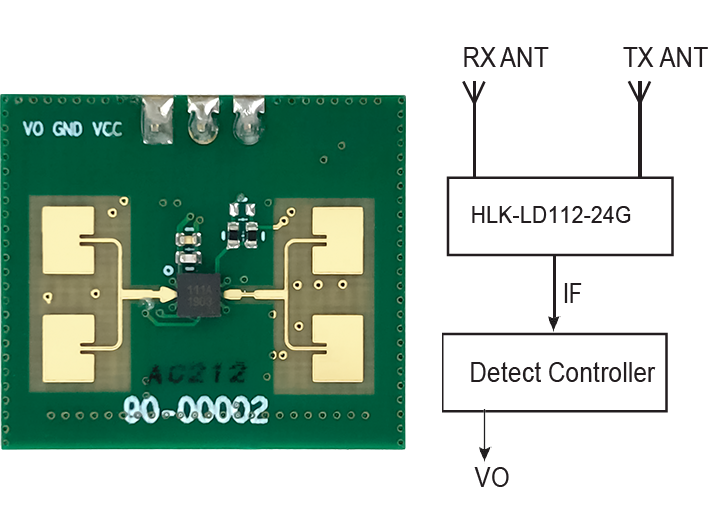
HLK-LD112-24G Internet of Things microwave radar module, which can be used to detect moving targets in a small range, and output high and low level information, and is not affected by the installation environment. It can automatically filter various debris (still life) in the environment, Such as tables, mops, etc.
HLK-LD112-24G has industry-leading excellent performance, small size, low cost, and low power consumption. It can provide customers with ideal and better performance object movement monitoring solutions.
product features
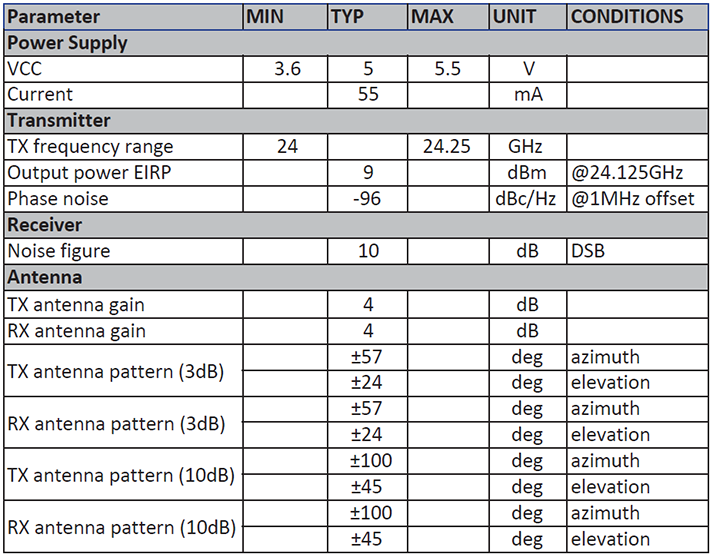
-TX frequency range: 24~24.25GHz
-TX EIRP: 9dBm
-Phase noise: -96dBc/Hz@1MHz offset
-RX noise figure: 10 dB DSB
-5V power supply current: 55mA
-Small size: 22.95mm×20mm
Electrical characteristics (at 25°C)
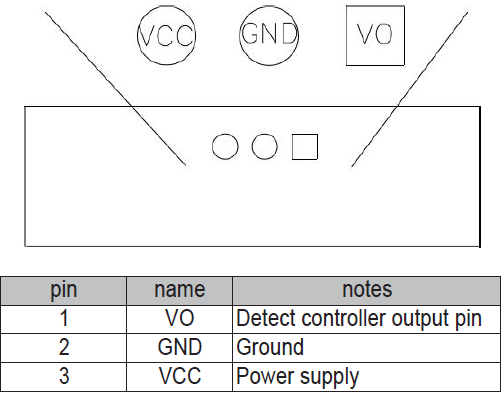
Connection instructions
The pin is 2.54mm 1×3 pin connector connection.
Module dimensions

Parameter debugging method
* VO: Detection level output. When a person or an object is detected to move, it outputs a high level for about 1 second. Low level when there is no object moving.
* GND: Ground.
* VCC: Power supply. The version with LDO is powered by a 5V power supply.
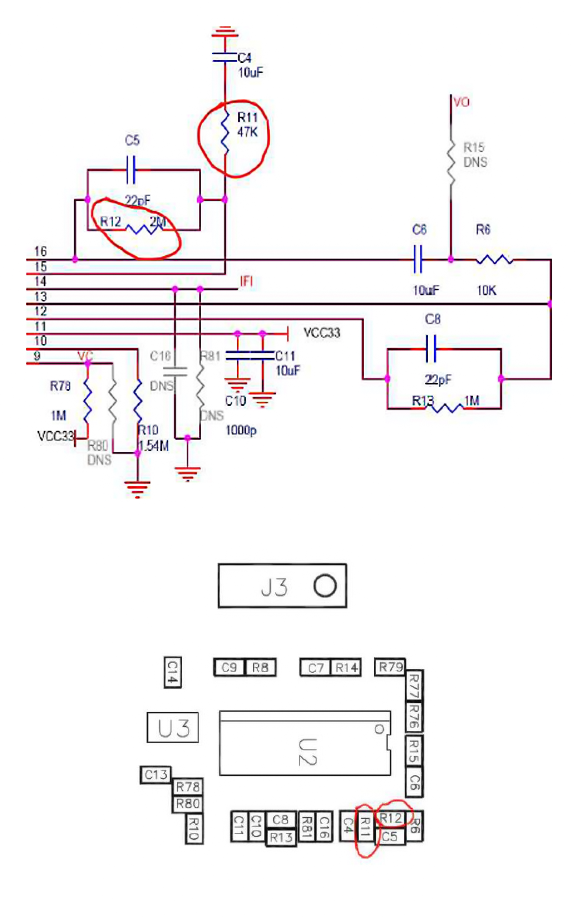
1.Sensitivity debugging method A
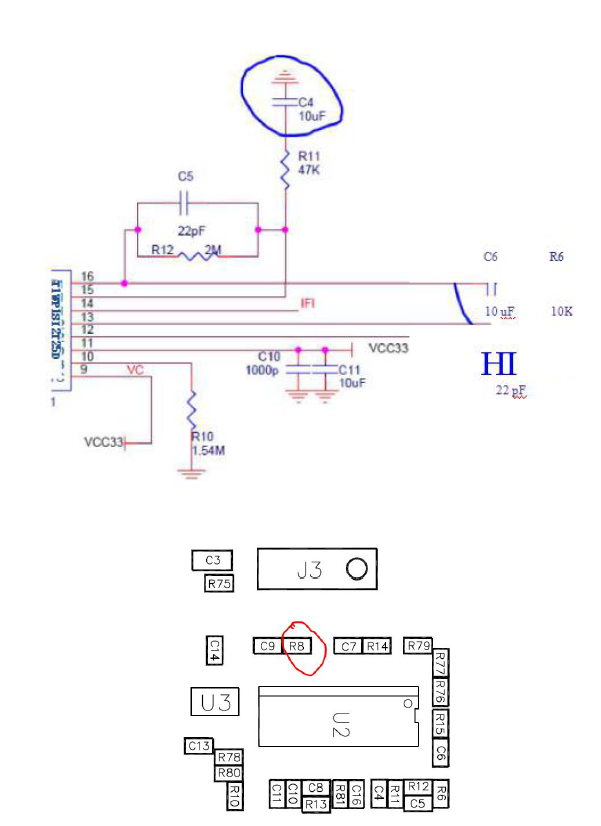
A1. Current sensitivity magnification=(R12/R11)*(R13/R6)=(1M/20K)*(1M/10K)=5000 times. Considering that some shell materials have greater attenuation of electromagnetic waves, the default sensitivity is 5000 times, which is a relatively sensitive value. The sensitivity can be modified according to actual application scenarios.
A2. If you need to reduce the sensitivity, it is recommended to directly change the resistance of R11 and increase the resistance of R11. For example, if you need to modify it to 2000 times, then just change R11 to 50k.
1-2. Sensitivity debugging method B
Decreasing the capacitance of C4 and C6 can change the link bandpass characteristics and increase the high-pass cutoff frequency. In this way, the module will be insensitive to some minor actions, and the module will be more stable and difficult to trigger. At the same time, the initial startup time of the module can be greatly reduced. It is recommended to change to 2.2uF or 1uF. Specific effects can be debugged according to actual conditions. The side effect is that the sensing distance will be reduced by about 20%.
2. Block time debugging method
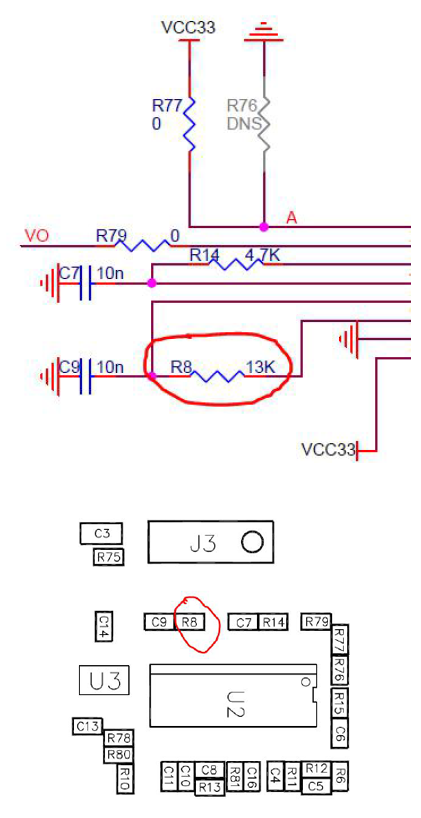
A1. Blocking time refers to the time after the current detection is completed and the output level returns to 0 level until the next detection takes effect. This time can be adjusted by changing the resistance of R8.
A2. The current blocking time is about 0.8 seconds, corresponding to R8=39k. It is not recommended to reduce it. If the blocking time is too small, the module will be easily triggered by interference. An excessively large R8 will cause the module to underreport.
The approximate relationship between block time and R8:

3. Debugging method of high-level output maintenance time after trigger

A1. The high level maintenance time after triggering is the maintenance time for the module to output 3.3V high level after detecting a moving object.
A2. The current high-level output sustain time is about 1 second, corresponding to 14=4.7k. The value of R14 corresponding to the output holding time is shown in the table below.
The current module is powered by 5V, and there is an LDO on the module to change 5V to 3.3V, so VD=3.3V shall prevail.









 Official mall
Official mall
 Taobao shop
Taobao shop
 TMALL
TMALL





